Hi, I am
Monish Reddy Kotturu
About me
I am a software engineer at Cognex Corporation. I received my B.S. in computer science in 2023 and M.S. in computer science in 2024 from the University of Massachusetts Lowell. My interests include data science, reinforcement learning, robotics, and web development.
Work experience
Frontend Web Development Intern
Kaizntree
I worked at Kaizntree as a remote web development intern during summer 2021. My work involved creating components using Vue.js that interact with a REST API in Django to retrieve and display information and provide inputs to the user to modify data in a web application. I also debugged existing components and designed a user experience to minimize the user effort and time.
- Vue.js
- Vuetify
- Django
- Git
Research experience
Research Assistant
The AI-CARING Institute
My work in AI-CARING focused on investigating the adjustment of trust among older adults towards robots that exhibit affiliation changes in a human-robot collaboration context.
- Human-Robot Interaction
- Human-Computer Interaction
- Python
- PyQt
Research Assistant
PeARL Lab (under the AI-CARING institute and the ARL STRONG project)
I worked under the supervision of Professor Reza Ahmadzadeh to investigate the multi-agent multi-armed bandit problem in reinforcement learning. The main goal was to expedite the emergence of consensus among the agents in a network faced with a decision making problem. I worked on the implementation of multi-agent multi-armed bandit algorithms and simulations to test the performance of various optimization methods. The culmination of this work is my master's thesis, which focuses on accounting for various real-world constraints in the multi-agent multi-armed bandit context such as agent competency, bandit difficulty, and sequences of bandits, and optimizing team performance in the presence of these factors.
- Python
- NumPy
- Numba
- Matplotlib
- NetworkX
Research Assistant
PeARL Lab (under the ARL STRONG project)
My research in the ARL STRONG project focused on developing a web interface to conduct virtual human-robot trust experiments. I created a web application that simulates a 2D human-robot collaboration game that examines the development of trust in human-robot networks by collecting various responses during the participants' playtime. So far, I deployed over 30 variations of this game on Amazon MTurk and Prolific which allowed hundreds of participants to contribute to the study's dataset. Several papers have been published based on the results and some are currently under review.
- HTML/CSS/JS
- jQuery
- Python
- Express
- MongoDB
- Heroku
Publications
Accepted/Published
Relational Weight Optimization for Enhancing Team Performance in Multi-Agent Multi-Armed Bandits
Monish Reddy Kotturu, Saniya Vahedian Movahed, Kshitij Jerath, Paul Robinette, Amanda Redlich, Reza Azadeh
Modeling, Estimation and Control Conference (MECC) 2024
- Multi-Armed Bandits
- Cooperative Decision Making
- Consensus Optimization
Zahra Rezaei Khavas, Monish Reddy Kotturu, S. Reza Ahmadzadeh, Paul Robinette
ACM Transactions on Human-Robot Interaction (HRI) 2024
- Human-Centered Computing
- Human-Robot Interaction
- Human-Robot Trust
Do Humans Have Different Expectations Regarding Humans and Robots' Morality?
Zahra Rezaei Khavas, Monish Reddy Kotturu, S. Reza Ahmadzadeh, Paul Robinette
IEEE International Conference on Robot and Human Interactive Communication (IEEE RO-MAN) 2024
- Human-Robot Interaction
- Human-Robot Collaboration
- Human-Robot Trust
Human-Robot Interaction Experiment: Minor Changes; Significant Differences?
Zahra Rezaei Khavas, Monish Reddy Kotturu, S. Reza Ahmadzadeh, Paul Robinette
Second International Symposium on Trustworthy Autonomous Systems (TAS) 2024
- Human-Robot Interaction
- Human-Robot Collaboration
- Human-Robot Trust
Do humans retaliate against immoral robots?
Zahra Rezaei Khavas, Monish Reddy Kotturu, S. Reza Ahmadzadeh, Paul Robinette
International Symposium on Technological Advances in Human-Robot Interaction (TA-HRI) 2024
- Human-Robot Interaction
- Human-Robot Collaboration
- Human-Robot Trust
Performance vs. Moral Trust Violation by Robots: Can Physiological Measures Differentiate the Effects of Those on Humans?
Zahra Rezaei Khavas, Monish Reddy Kotturu, S. Reza Ahmadzadeh, Paul Robinette
Taking a Closer Look: Refining Trust and its Impact in HRI, HRI 2024
- Human-Robot Interaction
- Human-Robot Collaboration
- Human-Robot Trust
Zahra Rezaei Khavas, Monish Reddy Kotturu, Russell Perkins, S. Reza Ahmadzadeh, Paul Robinette
Journal of Software (JSW) 2023
- Human-Robot Interaction
- Human-Robot Trust
Russell Perkins, Zahra Rezaei Khavas, Kalvin McCallum, Monish Reddy Kotturu, Paul Robinette
International Conference on Social Robotics (ICSR) 2022
- Human-Robot Interaction
- Human-Robot Collaboration
- Trust Calibration
- Trust Repair
Posters
RT3: Towards Improving Team Performance in Multi-Agent Multi-Armed Bandits
Monish Reddy Kotturu, S. Reza Ahmadzadeh
AI-CARING 2nd Annual Meeting and Site Visit 2023
- Multi-Armed Bandits
- Distributed Decision Making
- Consensus Optimization
Towards Improving Team Performance in Multi-Agent Multi-Armed Bandits
Monish Reddy Kotturu, S. Reza Ahmadzadeh
Northeast Robotics Colloqium (NERC) 2022
- Multi-Armed Bandits
- Distributed Decision Making
- Consensus Optimization
Projects
Medication Delivery Robot
As part of the final group project in my assistive robots class, my team and I designed and implemented a medication delivery robot that uses face detection and autonomous navigation to deliver medication to older adults in an assisted living facility, demonstrating a high level of autonomy. Our code was implemented and tested on the Stretch RE1 robot developed by Hello Robot.
- Python
- ROS
- OpenCV
Northeast Robotics Colloqium (NERC) 2022 Website
I created the website for the Northeast Robotics Colloquium (NERC) 2022, which was hosted by the University of Massachusetts on October 8, 2022. This event is a research meeting, job-fair, and a show case for established and up-coming robot companies that brought together roboticists in the northeastern United States and Canada. I maintained up-to-date information about the event details such as schedule, location, registration, and more.
- HTML/JS
- Tailwindcss
- Vite
Strengthening Teamwork for Robust Operations in Novel Groups (STRONG) Website
I created the website for Trust-NEARCHAT, the group of researchers that I am a part of at the University of Massachusetts Lowell in the ARL STRONG team. This website is a display of the focus of the project and the work done and published by our group.
- React
- Tailwindcss
- Netlify
Others
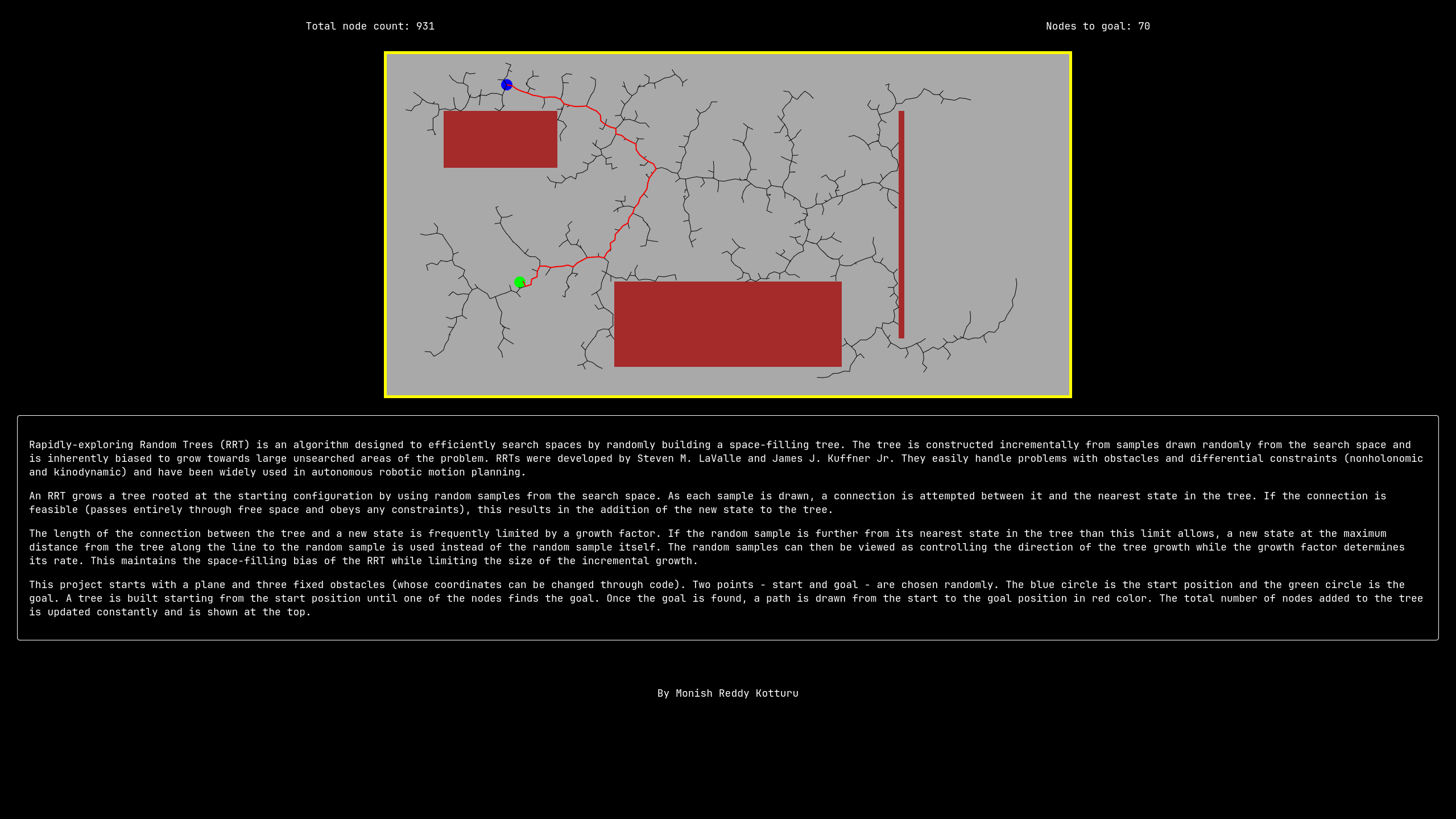
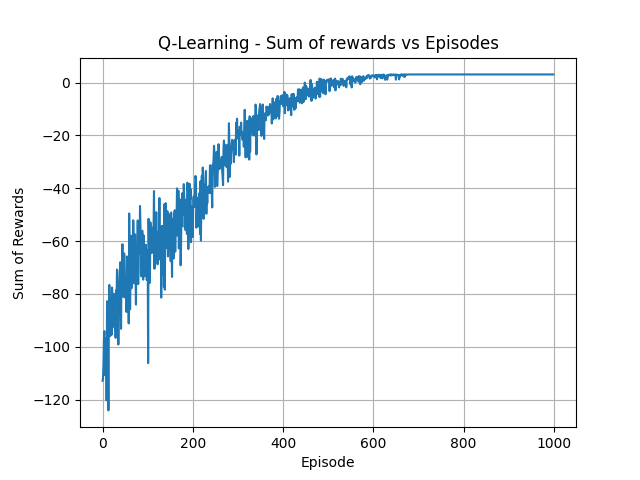
My other works, some completed for classes and some for fun, include search algorithms such as RRT and A*, the famous evil hangman game, reinforcement learning algorithms including tabular methods and approximation methods, and more. Check out my GitHub profile for more details and repositories.
- HTML/CSS/JS
- C/C++
- Python